The Rimac Concept_One is probably my favorite electric supercar that exists at this moment. It quicker than the Ferrari LaFerrari, Porsche 918 Spyder, and Tesla P100D in a straight line and faster around a track than a Bugatti Veyron.
Founded in 2009, Croatia-based Rimac first stepped into the spotlight when it revealed the E-M3, an BMW M3 e30 fitted with a ~600 horsepower electric motor. Since then, Rimac has become a lot more refined, even going as far as developing their own car, the Concept_One. What is even more impressive is the car's ability to dynamically handle its 1,180 pound-feet of torque (which, by the way, is available completely throughout the powerband) is sent to all four wheels.
And the car is properly quick. Off the line, the car can deliver acceleration from 0-60 mph in 2.6 seconds and 186 mph in only 14.2 seconds.
Torque vectoring keeps the vehicle planted to the road, similar to how the Focus RS' "Drift Mode" button works, except Rimac's system is a lot more refined. Simply put, with the turn of the dial, you can set the Concept_One to understeer, oversteer, or perform like a completely balanced machine. It even has a drift mode that works quite well.
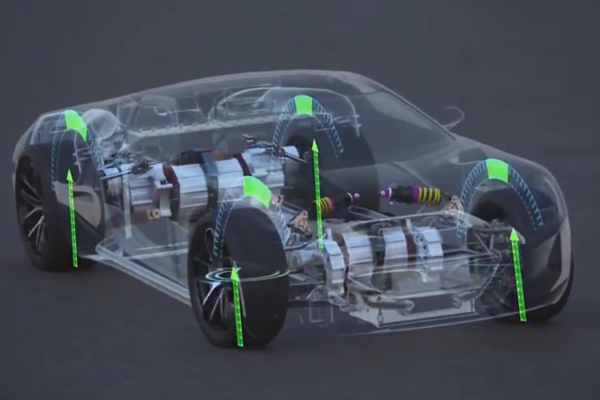
Each wheel has a motor that recharges the battery through regenerative braking and puts power to the ground. A series of complex sensors also pair with the motor to provide data back to the Rimac's ECU. Depending on how you're feeling that day, or maybe on which torque vectoring mode you select, the car will use the sensor data to decide how much power to send to each wheel. Off the track, the Concept_One, sensor telemetry data is uploaded to the cloud for later dissemination and reporting. So if you'd like to see just how you performed that day, just log in and study.
Check out this video to see how the Rimac Concept_One distributes its power: